



1931年,Gwinnett在其专利中提出了一种基于球面并联机构的娱乐装置;
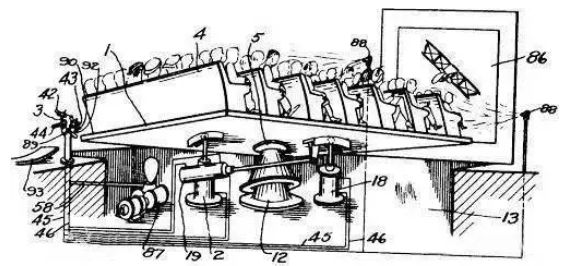
并联娱乐装置 1940年,Pollard在其专利中提出了一种空间工业并联机构,用于汽车的喷漆;
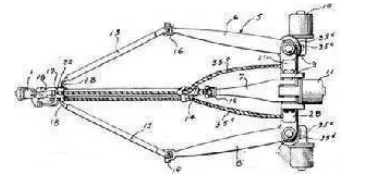
Pollard的并联机构 1962年,Gough发明了一种基于并联机构的六自由度轮胎检测装置; 并联机器人 1965年,Stewart首次对Gough发明的这种机构进行了机构学意义上的研究,并将其推广应用为飞行模拟器的运动产生装置,这种机构也是目前应用最广的并联机构,被称为Gough-Stewart机构或Stewart机构。
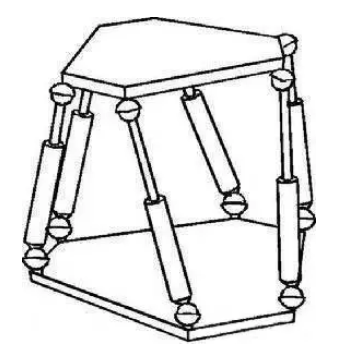
Gough- Stewart机构 1978年,Mccallino等人首次设计出了在小型计算机控制下,在精密装置中完成校准任务的并联机器人,真正拉开了并联机器人研究的序幕。 80年代末期到90年代以来,并联机器人才引起广泛注意。
国内1991年,燕山大学黄真教授在研制出我国第一台六自由度并联机器人样机; 1997年,清华大学和天津大学合作研制的大型镗床类并联样机VAMTIY; 1998年,东北大学研制了五轴联动三杆并联机床DSX5-70。 1999年,天津大学和天津第一机床总厂合作研制了三坐标并联机床商品化样机LINAPOD,哈尔滨工业大学也研制了一台六自由度并联机床样机。 我国对并联机器人的研究起步较晚,技术与国外相比还存在着差距。在并联机器人不过,经过近几年的发展,国产并联机器人应用水平日益提高,逐渐受到企业的认可与使用。
并联机构(Parallel Mechanism,简称PM),可以定义为动平台和静平台(定平台)通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。 其特点有:结构紧密相连,刚度高,承载能力大;无累计误差,精度高;占用空间小;速度快,运动性能佳,部件磨损小,寿命长。

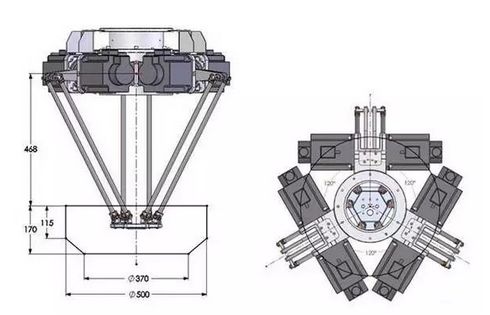
在并联机器人机构体系中,有多种机构种类的划分,按照自由度划分,分为: 2 自由度并联机构 在并联机构领域,2自由度并联机构的自由度最少,分为平面结构和球面结构两大类,一般适用于平面或球面定位,应用领域大。 天津大学拥有独立知识产权的二自由度并联机构Diamond机器人目前已规模化应用在电子、医药、食品等工业领域中,为包装、移载等物流环节提供了高效、高质的保障。 3 自由度并联机构 3 自由度并联机构种类较多,形式较复杂,一般有以下形式:平面3自由度并联机构,如3-RRR 机构,它们具有2个移动和一个转动;球面3自由度并联机构,如3-UPS-1-S 球面机构,该类机构的运动学正反解都很简单,是一种应用很广泛的3维移动空间机构;空间3自由度并联机构,这类机构属于欠秩机构,在工作空间内不同的点其运动形式不同是其最显著的特点。还有一类是增加辅助杆件和运动副的空间机构。 4 自由度并联机构 4 自由度并联机构大多不是完全并联机构,不过能扩大应用场景范围,在三自由度并联机构的基础上增加一个转动自由度,形成四自由度并联机器人。 5 自由度并联机构 国际上一直认为不存在全对称五自由度并联机器人机构。不过,非对称五自由度并联机器人机构非常容易综合。Lee和Park在1999年提出一种结构较为复杂的双层五自由度并联机构;Jin等在2001年综合出具有三个移动自由度和两个转动自由度的非对称五自由度并联机构。 6 自由度并联机构
6 自由度并联机构是并联机器人机构中的一大类,是国内外学者研究得最多的并联机构,大范围的应用在飞行模拟器、6维力与力矩传感器和并联机床等领域。但这类机构有很多关键性技术没有或没有完全得到解决,比如其运动学正解、动力学模型的建立以及并联机床的精度标定等。
并联机构多用于需要高刚度、高精度、高速度,无需大空间的场合,具体应用包括:1、食品、医药、电子、化工行业的分拣、搬运、装箱等。2、模拟运动如飞行员三维空间训练模拟器;工程模拟器,如船用摇摆台等;检验测试产品在模拟的反复冲击、振动下的运行可靠性;娱乐运动模拟台。 波音737-400飞行模拟器3、并联机床4、对接动作航天器对接口如宇宙飞船的空间对接;汽车装配线上的车轮安装;医院中的假肢接骨。5、承载运动如大扭矩螺栓紧固;短距离重物搬运。6、金属切削加工可应用于各类铣床、磨床钻床或点焊机、切割机。7、可用于测量机,用来作为其他机构的误差补偿器8、微操作机器人用于微动机构或者微型机构9、机器人关节可用作机器人的关节,爬行机构、食品、医药包装和移载机械手等。
并联机器人在操作中具有重量轻、刚度高、速度快等等许多优势,应用于许多不相同的领域,因此,了解一些它的相关知识,相信会对您有所帮助。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

(如Delta机构)各两件间的对象关系,怎么设置啊有没有人知道啊?目前见到的都是串联型机构。
这类设备大多数都用在精密紧凑的应用场合,竞争点集中在速度、重复定位精度和动态性能等方面。
本帖最后由 zhang0605lei 于 2016-1-28 10:45 编辑
、KUKA、Yaskawa Motoman、FANUC2.2.1 本体结构本体结构
总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、
,大大提高了劳动生产率,降低了工人的劳动强度,提高了产品质量。与此同时,随着工业
旨在将共同生活的亲属从家居的繁琐家务中解放出来,给共同生活的亲属提供帮助、娱乐等。
都获得了广泛的应用。这一方面与全球自动化生产需求的不断释放,以及人口红利的日渐式微紧密关联,另一方面更是得益于各种智能技术的持续进步与完善。
状况。全书共分为12章,由基础篇、控制结构篇和先进控制篇构成。基础篇着重介绍串联关节
为控制对象,以NI公司的系列软硬件产品为基础,依托国家自然基金(No. 30770538)的支持,快速开发了此
是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系
技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的
已经走到行业的前沿, 他们的主要特征是能够安全地协助人类工作。在网上有很多人谈论它们,但你认线
,研究门槛高,实际的商业用途不是很广,所以大多还停留在样品阶段,走进市场的很少。
系统中一个重要的子系统,也慢慢变得受到人们的重视。它涉及了图像处理、模式识别和视觉
重要的理论意义和应用价值,它具有多学科融合和多技术集成的特点,涉及众多学科
已经开始接管人类的部分工作,例如快递、工厂作业、餐厅服务员甚至媒体编辑---就聘请了一位
, 但在某一些场合2~5 个自由度即可满足使用上的要求, 这类少于6 自由度
RJU系列关节模组——面向商业、生活服务类应用一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的
控制系统 应用成熟的NI系列新产品快速构建一套功能完善、性能优越、人机界面友好的开放式多自由度
工作空间的影响因素,以支腿长度约束、支腿与动平台交汇条件以及支腿与动平台夹角限制为约束条件,并采用快速极坐标搜索法确定了3-RPR
构动力学特性具有高度非线性、强耦合的特点,使其控制较为复杂。总体来讲,
构的所有分支最好具有完全相同的结构,保持结构的对称,以满足各向同性的要求。以单开链支路为单元,提出了一种新型的对称的少自由度的
的高精度轨迹跟踪控制。该非线性 P ID 控制器由两个二阶非线性微分提供高质量的微分信号, 并采用非线
技术的瓶颈,在实际应用中采用的广义几何法和方程组的数值解法等,不但推导过程很复杂,而且在求解
同步耦合误差控制理论,提出了一种非线性同步操控方法。首先,利用李雅普诺夫稳定性理论,对提出的控制办法来进行稳定性
市场基本上由发那科、爱德普、ABB等企业占据,国产化率基本稳定在25%左右。在外资品牌加快对中国
,一般人想到的其实是那种单独的机械臂,围绕着杠杆和关节进行旋转作业。这种
, 但在某一些场合2~5 个自由度即可满足使用上的要求, 这类少于6 自由度
,英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以
具有速度快、柔性强、刚度高、质量轻等优势,在机床、食品、医药、电子、物流等
市场销售约为620台,2015年销售约为970台,2016年销售约为1100台,2017年销售约为2790台,2018年销售约为3650台,年均以50%的增速
在上世纪的90年代就已经有所应用了,主要在医药、电子等轻工业使用作为广泛,
有着承载能力大;精度高;占用空间小;速度快;耐磨损等特点。这对需要高精度的工业生产来说是个很好的选择。
的出现是为了给人类解决更多的麻烦,而不是以往那样,一种工具只能单一的解决某一种问题。
市场,参与的玩家不多,国际企业包括ABB、发那科、博力实、欧姆龙等,中国企业包括勃肯特、阿童木、华盛控、李群等。高工产研
的生产公司数也较少,但是其在航空、金属加工、食品等行业的市场占有率并不低。 2019年全球经济发展形势动荡较大,影响了汽车和3C行业
,产品包括卫生级产线设计,非常适合于餐饮、制药等卫生敏感型行业。通过此项交易,ABB正在加速其在持续增长的
,目前主要由ABB在上海的工厂生产。此外,2018年,ABB宣布斥资1.5亿美元在上海建造
一般需要外配视觉,视觉成本比较高,加之较高的品牌溢价,IRB 360在市场上的售价也长期居高不下。
产业联盟筹备磋商会在西青开发区圆满落下帷幕。本次活动由天津西青经济技术开发区主办,聚集了勃肯特
市场销量约620台,2015年销量约970台,2016年销量约1100台。2017年,销售额约为2790台,2018年的销量约为3650台。2019年
是指动平台和定平台,通过至少两个独立的运动链相连接,机构具有两个或者两个以上的自由度,以
,英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以
进化之路》主题演讲。他从技术创新、应用创新方面出发,分析怎么样打造出类拔萃的国产
相比有着非常明显优势,应用场景范围更广。 2019年,得益于在食品、医药、日化等
装置,具有超强实用性、超高检测精度等特点,它在各个行业都得到了十分普遍应用。那么
系统结构,它们在设计和应用上存在着一些明显的区别。 1. 结构和连接方式: 首先,从结构和连接方式上来比较,


